SISTEMAS DE UN ROBOT
SISTEMA MECÁNICO
Los sistemas mecánicos son aquellos sistemas constituidos fundamentalmente por componentes, dispositivos o elementos que tienen como función específica transformar o transmitir el movimiento desde las fuentes que lo generan, al transformar distintos tipos de energía.

- Se caracterizan por presentar elementos o piezas sólidos, con el objeto de realizar movimientos por acción o efecto de una fuerza.
- En ocasiones, pueden asociarse con sistemas eléctricos y producir movimiento a partir de un motor accionado por la energía eléctrica.
- En general la mayor cantidad de sistemas mecánicos usados actualmente son propulsados por motores de combustión interna.
- En los sistemas mecánicos. se utilizan distintos elementos relacionados para transmitir un movimiento.

Es una serie de elementos o componentes eléctricos o electrónicos, tales como resistencias, inductancias, condensadores, fuentes, y/o dispositivos electrónicos conectados eléctrica mente entre sí con el propósito de generar, transportar o modificar señales y electrónicas o eléctricas.
Un circuito eléctrico tiene que tener estas partes,
o ser parte de ellas.
1. Por el tipo de señal: De corriente continua,
de corriente eléctrica y mixtos.
2. Por el tipo de régimen: Periódico ,
Transitorio y Permanente.
3. Por el tipo de componentes: Eléctricos:
Resistivos, inductivos y mixtos. Electrónicos: digitales,
analógicos y mixtos.
4. Por su configuración: En Serie y Paralelo.
Características de los
Sistemas Eléctricos
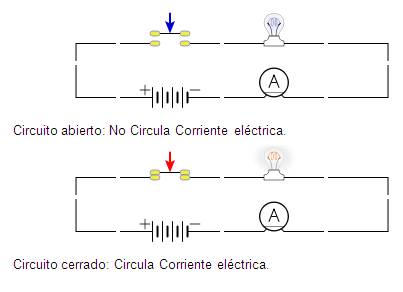
· 1. Todo circuito eléctrico está formado por una fuente de energía, conductores (cables), y un receptor que transforma la electricidad en Luz (lámparas),en movimiento(motores), en calor(estufas).
·
2. Para
que se produzca la transformación, es necesario que circule corriente por el
circuito.
3. Este debe estar compuesto por elementos
conductores, conectados a una fuente de tensión o voltaje y cerrado.
4. Los dispositivos que permiten abrir o cerrar
circuitos se llaman interruptores o llaves.

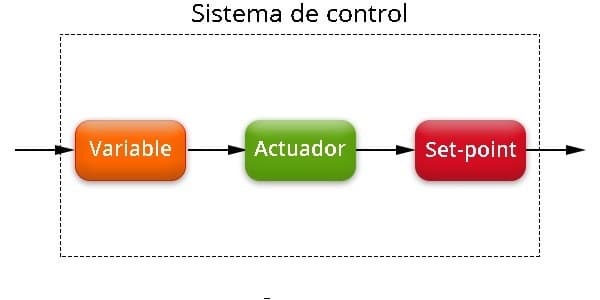
SISTEMA DE CONTROL
un sistema de control como el conjunto de maquinaria dedicada a manejar otros sistemas. En sí los sistemas de control suelen estar compuestos por circuitos electrónicos, los cuales están cargados con programas para controlar los sistemas que le han sido encargados. La principal ventaja de estos sistemas sobre la mano de obra humano son las probabilidades de éxito, ya que estas máquinas no suelen cometer errores cuando están bien programadas.
Los sistemas de control realizan tareas que normalmente sería hechas por personas comunes, pero utilizarlos otorga mejores resultado y nos libera de hacer estos trabajos. Además los sistemas pueden dividirse en 2 clases, una dedicada a sistemas de lazo cerrado y otras dedicadas a los sistemas de lazo abierto.
Por un lado, aquellos sistemas de control de lazo abierto no necesitan conocer datos sobre la salida y esta no afecta su desempeño. En el caso contrario, los sistemas de control cerrado si tienen la necesidad de conocer cual es la salida y sin ella no son capaces de ejercer control.


- Campo de vista
- Rango de operación
- Exactitud y resolución
- Velocidad de muestreo
- Requerimientos computacionales
- Potencia, peso y tamaño
- Robustez
- Sensibilidad
Sensores Internos
Sensores Externos



Comentarios
Publicar un comentario