ARDUINO Y SENSORES
ARDUINO UNO

PARTES DE UN ARDUINO
El arduino como todo componente esta conformado distintas partes como son entradas, salidas, alimentación, comunicación y shields.
Entradas
Son los pines de nuestra placa que podemos utilizar para hacer lecturas. En la placa Uno son los pines digitales (del 0 al 13) y los analógicos (del A0 al A5).
Salidas
Los pines de salidas se utilizan para el envío de señales. En este caso los pines de salida son sólo los digitales (0 a 13).
Otros pines
También tenemos otros pines como los GND (tierra), 5V que proporciona 5 Voltios, 3.3V que proporciona 3.3 Voltios, los pines REF de referencia de voltaje, TX (transmisión) y RX (lectura) también usados para comunicación serial, RESET para resetear, Vin para alimentar la placa y los pines ICSP para comunicación SPI.
Alimentación
Como hemos visto el pin Vin sirve para alimentar la placa pero lo más normal es alimentarlo por el jack de alimentación usando una tensión de 7 a 12 Voltios. También podemos alimentarlo por el puerto USB pero en la mayoría de aplicaciones no lo tendremos conectado a un ordenador.
Comunicación
En nuestros tutoriales nos comunicaremos con Arduino mediante USB para cargar los programas o enviar/recibir datos. Sin embargo no es la única forma que tiene Arduino de comunicarse. Cuando insertamos una shield ésta se comunica con nuestra placa utilizando los pines ICSP (comunicación ISP), los pines 10 a 13 (también usados para comunicación ISP), los pines TX/RX o cualquiera de los digitales ya que son capaces de configurarse como pines de entrada o salida y recibir o enviar pulsos digitales.
Shields
Se llama así a las placas que se insertan sobre Arduino a modo de escudo ampliando sus posibilidades de uso. En el mercado existen infinidad de shields para cada tipo de Arduino. Algunas de las más comunes son las de Ethernet, Wi-Fi, Ultrasonidos, Pantallas LCD, relés, matrices LED’s, GPS.
ARDUINO NANO

- La tarjeta AR-NANO ( NANO) es una placa de desarrollo diseñada para proyectos electrónicos y de robótica, trabaja en conjunto con el software Arduino.
- La característica más destacable de esta placa es que a pesar de su tamaño (0,73 pulgadas de anchura por 1,70 de longitud), sigue ofreciendo el mismo número de salidas y entradas digitales y analógicas que la Arduino UNO y la misma funcionalidad que este.
- Carece del conector de alimentación de 2,1 mm, aunque puede ser alimentado mediante el pin “Vin” o “5 V” e incorpora un conector MINIUSB.
- LED azul en la base para indicar el encendido, LED Verder (TX), Rojo (RX) y Naranja (L)
- Jumper para +5V conectado a AREF, Regulador de tensión integrado
- Pines con espaciado de 0.1” DIP para insertarlo directamente sobre una protoboard, Botón de reset integrado.




El sensor HC-SR04 posee dos transductores: un emisor y un receptor piezoeléctricos, además de la electrónica necesaria para su operación.
Como funciona
El funcionamiento del sensor es el siguiente: el emisor piezoeléctrico emite 8 pulsos de ultrasonido(40KHz) luego de recibir la orden en el pin TRIG, las ondas de sonido viajan en el aire y rebotan al encontrar un objeto, el sonido de rebote es detectado por el receptor piezoeléctrico, luego el pin ECHO cambia a Alto (5V) por un tiempo igual al que demoró la onda desde que fue emitida hasta que fue detectada, el tiempo del pulso ECO es medido por el microcontrolador y asi se puede calcular la distancia al objeto. El funcionamiento del sensor no se ve afectado por la luz solar o material de color negro (aunque los materiales blandos acusticamente como tela o lana pueden llegar a ser difíciles de detectar).
La distancia se puede calcular utilizando la siguiente formula:
Distancia(m) = {(Tiempo del pulso ECO) * (Velocidad del sonido=340m/s)}/2


Partes de un servomotor
Los servos incluyen tres componentes principales: un motor, un variador (también conocido como amplificador) y un mecanismo de retroalimentación. También se incluye típicamente una fuente de alimentación y un servocontrolador capaz de controlar un solo eje o coordinar el movimiento de varios ejes.
Los servomotores pueden ser de tipo CA o CC, siendo los servomotores CA los más adecuados para aplicaciones de velocidad constante y los servomotores CC para aplicaciones de velocidad variable.
La retroalimentación es proporcionada normalmente por un codificador o encoder -ya sea interno o externo al motor- o por un resolver. En aplicaciones que requieren un posicionamiento muy preciso, se pueden utilizar dos dispositivos de retroalimentación: uno en el motor para verificar el rendimiento del motor y otro en la carga para verificar la posición real de la carga.
Un servo accionamiento amplifica la señal de un controlador maestro proporcionando la suficiente corriente (potencia) al motor para generar velocidad y producir par. En un motor rotativo, la corriente es proporcional al par, por lo que el servomotor controla directamente el par producido por el motor.
Del mismo modo, en un motor lineal, la corriente es proporcional a la fuerza, por lo que el accionamiento controla la fuerza producida por el motor.
El servo controlador (también conocido como controlador de movimiento) puede ser considerado como el cerebro del sistema del servomotor. Aquí es donde reside el perfil de movimiento, incluyendo la aceleración, velocidad y deceleración deseadas.
El controlador envía señales al convertidor, lo que hace que el motor ejecute el movimiento deseado. También tiene la importante tarea de cerrar el bucle en el sistema leyendo la retroalimentación del encoder y modificando la señal al motor (a través del convertidor) para corregir cualquier error en la posición real frente a la deseada, velocidad o par.

Cómo funciona un servomotor
Los servomotores se controlan enviando un pulso eléctrico de ancho variable, o modulación de ancho de pulso (PWM), a través del cable de control. Hay un pulso mínimo, un pulso máximo y una frecuencia de repetición.
Por lo general, un servomotor sólo puede girar 90° en cualquier dirección para un movimiento total de 180°. La posición neutra del motor se define como la posición en la que el servo tiene la misma cantidad de rotación potencial tanto en el sentido de las agujas del reloj como en el sentido contrario.
El PWM enviado al motor determina la posición del eje, y se basa en la duración del pulso enviado a través del cable de control; el rotor girará a la posición deseada.
El servomotor espera ver un pulso cada 20 milisegundos (ms) y la longitud del pulso determinará hasta dónde gira el motor. Por ejemplo, un pulso de 1.5ms hará que el motor gire a la posición de 90°.
Si el tiempo es inferior a 1,5 ms, se mueve en sentido contrario a las agujas del reloj hacia la posición de 0°, y si el tiempo es superior a 1,5 ms, el servo girará en sentido de las agujas del reloj hacia la posición de 180°.
Cuando se les ordena a los servos que se muevan, estos se moverán a la posición y mantendrán esa posición. Si una fuerza externa empuja contra el servo mientras el servo mantiene una posición, el servo se resistirá a salir de esa posición.
La cantidad máxima de fuerza que puede ejercer el servo se denomina par de torsión del servo. Sin embargo, los servos no mantendrán su posición para siempre; el pulso de posición debe repetirse para indicar al servo que se mantenga en posición.

Un potenciómetro es una resistencia variable que se utiliza mecánicamente para medir la diferencia de potencial eléctrico entre dos terminales eléctricos. La diferencia de potencial es lo que comúnmente se conoce como voltaje.
Los primeros potenciómetros y más sencillos son los reóstatos.
El potenciómetro es un dispositivo que limita el paso de la corriente eléctrica, provocando una caída de tensión. El hecho de que la tensión pueda variar permite controlar diferentes dispositivos, ya que el funcionamiento de los dispositivos puede ser regulado por la cantidad de tensión dada por el potenciómetro.
El potenciómetro consta de dos resistencias en serie. El valor de estas resistencias puede ser modificado por el usuario.
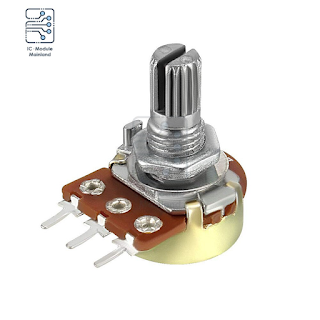
Partes de un potenciómetro
- Parte fija: El potenciómetro tiene una parte fija que se encarga de establecer una resistencia eléctrica.
- Parte móvil: Esta parte está en contacto con la parte fija. Cuando se mueve hace variar la resistencia eléctrica introducida en los terminales del potenciómetro.
Cómo funciona el potenciómetro
Un potenciómetro tiene una operación simple. Consiste básicamente en una resistencia variable, que cambia su valor a medida que aumenta la corriente.
Esta resistencia tiene tres terminales a los que se conecta la tensión a medir.
Uno en cada extremo y una tercera conexión a un deslizador. Este control nos permitirá aumentar o disminuir la resistencia. El valor entre las conexiones se puede variar girando la parte móvil del potenciómetro.
Al variar la resistencia, la diferencia de potencial entre los terminales varía. Por lo tanto, el valor de la tensión viene determinado por la variación de la resistencia.




Módulo Sensor Infrarrojo- tcrt5000 - Seguidor Línea para Arduino


El módulo seguilíneas TCRT5000 es un sensor de que emite luz infrarroja, mediante un fotodiodo, que es reflejada por una superficie y captada por un fototransistor. El fototransistor es sensible a la luz recibida y genera una corriente en función dicha cantidad de luz que se transforma en voltaje eléctrico. En la configuración que se muestra a continuación, cuando el fototransistor es excitado con una fuente de luz, deja pasar corriente lo que hará que si medimos el voltaje justo entre la resistencia R2 y el fototransistor, la tensión tienda a 0V, mientras que si el fotodiodo no deja pasar la corriente, entonces la tensión que mediremos serán prácticamente Vcc.

Así pues, el nivel de señal analógica que proporciona el sensor dependerá por tanto de la cantidad de luz recibida. Esto puede depender de múltiples factores como la distancia de reflexión (distancia a la que se coloca el sensor con respecto a la superficie); el color de la superficie y la cantidad de luz infrarroja en el ambiente (dispone de un filtro para eliminar los efectos de la luz ambiental y de día, pero su uso en entornos exteriores está totalmente desaconsejado). Este tipo de sensores pueden utilizarse con diversos propósitos como la detección de objetos (presencia o no presencia) como un contacto de proximidad, ya que disponen de un corto alcance (máximo unos 15mm). En robótica, su principal utilidad es en aplicaciones del tipo seguilíneas en la que el sensor devolverá un valor distinto de función del color del suelo. Por ejemplo, si el suelo es de color negro el nivel de reflexión es muy bajo y el sensor devuelve un valor de señal elevado (lógica contraria). Si por el contrario el fondo del suelo es de color blanco el sensor apenas devuelve señal.
Higrometro Sensor De Humedad Del Suelo Arduino Modulo Hl -69
Este sensor tiene la capacidad de medir la humedad del suelo. Aplicando una pequeña tensión entre los terminales del módulo YL-69 hace pasar una corriente que depende básicamente de la resistencia que se genera en el suelo y ésta depende mucho de la humedad. Por lo tanto, al aumentar la humedad la corriente crece y al bajar la corriente disminuye.
Consiste en una sonda YL-69 con dos terminales separados adecuadamente y un módulo YL-38 que contiene un circuito comparador LM393 SMD (de soldado superficial) muy estable, un led de encendido y otro de activación de salida digital.


Como funciona el Higrometro Sensor De Humedad Del Suelo

Este Sensor permite detectar gotas de lluvia, como un sensor de lluvia, y seguimiento de humedad y se puede utilizar para una variedad de condiciones climáticas. Convierte en números la señal de referencia de salida output AO. La salida analógica puede ser conectada al puerto AD de un microcontrolador para detectar la intensidad de la humedad y la precipitación.
Este módulo consiste en una serie de pistas conductoras impresas sobre una placa de baquelita. La separación entre las pistas es muy pequeña. Lo que este módulo hace es crear un corto circuito cada vez que las pistas se mojan. El agua hace que se cree un camino de baja resistencia entre las pistas con polaridad positiva y las pistas conectadas al GND.
Posee un amplificador operacional, específicamente el circuito integrado LM393. Este es el encargado de amplificar el pequeño diferencial de voltaje que se general cuando una gota de agua cae sobre las pistas del módulo.


El sensor de lluvia, es un sistema completamente confiable que permite mantener plena visibilidad a través del parabrisas mientras manejamos bajo la lluvia.
En función del agua detectada, se activarán las plumillas con mayor o menor rapidez. En algunos modelos de marcas Premium, además de activar el funcionamiento y velocidad del limpiaparabrisas, el sistema cierra las ventanas y el quemacocos.
Este sistema posee sensores para detectar la luz ambiental, y de esa manera poder actuar también en la oscuridad.

Display 7 Segmentos 4 Dígitos I2c Para Arduino
Display 7 segmentos de 4 dígitos Cátodo Pines Horizontales.



La multiplexación de un Display, simplemente consiste en encender un único display, mostrar el numero y luego apagarlo, para encender el display que le sigue. El truco de encender y apagar el display a una alta velocidad, permite engañar al ojo humano, y tener la sensación de que todos los displays se encuentran energizados al mismo tiempo, pero en realidad, si lo vemos en cámara lenta, los displays de 7 segmentos de ánodo o cátodo común están haciendo la siguiente secuencia de multiplexación:

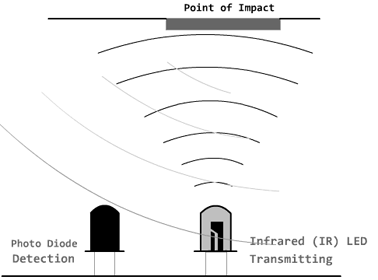
Un detector de obstáculos infrarrojo es un dispositivo que detecta la presencia de un objeto mediante la reflexión que produce en la luz. El uso de luz infrarroja (IR) es simplemente para que esta no sea visible para los humanos.
Constitutivamente son sensores sencillos. Se dispone de un LED emisor de luz infrarroja y de un fotodiodo (tipo BPV10NF o similar) que recibe la luz reflejada por un posible obstáculo.
Los detectores de obstáculo suelen proporcionarse con una placa de medición estándar con el comparador LM393, que permite obtener la lectura como un valor digital cuando se supera un cierto umbral, que se regula a través de un potenciómetro ubicado en la placa.
Este tipo de sensores actúan a distancias cortas, típicamente de 5 a 20mm. Además la cantidad de luz infrarroja recibida depende del color, material, forma y posición del obstáculo, por lo que no disponen de una precisión suficiente para proporcionar una estimación de la distancia al obstáculo.
Pese a esta limitación son ampliamente utilizados para la detección de obstáculos en pequeños vehículos o robots. Su bajo coste hace que sea frecuente ubicarlos en el perímetro, de forma que detectemos obstáculos en varias direcciones.
También son útiles en otro tipo de aplicaciones como, por ejemplo, detectar la presencia de un objeto en una determinada zona, determinar una puerta está abierta o cerrada, o si una máquina ha alcanzado un cierto punto en su desplazamiento.
Partes de un Sensor Presencia Obstáculos Infrarrojo




Como funciona el modulo bluetooth hc-06 compatible



Comentarios
Publicar un comentario